欧洲GLMAV新概念巡飞弹

近年来,巡飞弹作为一种将无人机和导弹技术结合在一起的跨界武器产品,以其机动性强、作战灵活、杀伤精准、附带损伤小等突出优点,成为发展最为迅速的新型航空武器之一。一直以来我们所认识到的巡飞弹,大都是采用类似固定翼无人机的传统布局。近日,欧洲久负盛名的兵器科研机构圣·路易法德联合研究所推出了一款全新概念的巡飞弹产品——GLMAV炮射侦察巡飞弹,它像俄罗斯卡莫夫设计局的直升机一样采用共轴双旋翼,充满想象力,为巡飞弹的未来发展打开了更加广阔的空间。
为何要研发带旋翼的巡飞弹
巡飞弹作为一种跨界兵器,目前的主要作用是侦察、监视和杀伤敌方目标,很多国家的炮兵部队等远程火力力量都倾向于使用巡飞弹兼任战场超视距侦察工作。这就需要巡飞弹能够快速飞行至目标区域并具备悬停飞行的能力。而传统固定翼巡飞弹无法悬停以提供目标区域静止的监视图像,顶多只能低速飞行进行监视和拍摄,而且非常容易受到阵风气流的干扰,造成飞机机身抖动,影响成像和拍摄质量。而旋翼式巡飞弹具备悬停飞行的能力,能够提供目标区域静止的较高质量监视画面。
我们知道旋翼无人机目前的结构有单旋翼、双旋翼、四旋翼或混合式旋翼等,根据法德联合研究所的研究人员试验论证后发现,其中共轴反向双旋翼结构最适合炮射巡飞弹的要求,它外廓尺寸最小,结构相比而言较为简单,同时飞行性能好。于是研究人员们进一步对共轴反向双旋翼结构进行研究,研发出了GLMAV新概念巡飞弹。
基本结构组成
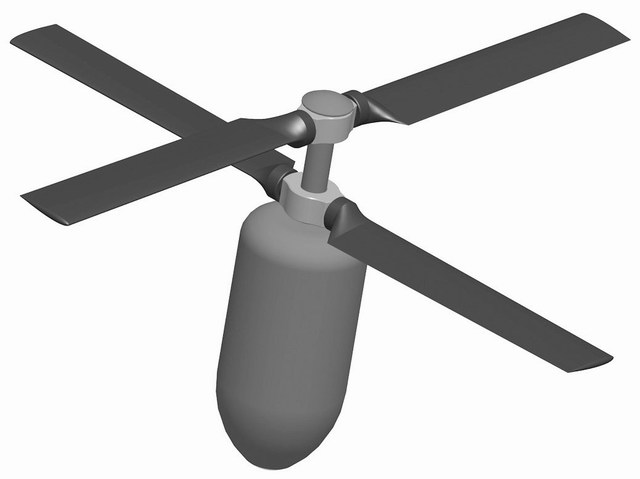
GLMAV的外形,就是一枚普通炮弹外加一个可折叠的共轴反向双旋翼飞行机构。但GLMAV普通炮弹的内部,实际上大有名堂,由于它是一枚侦察/监视巡飞弹,因此其内部结构与普通炮弹大相径庭。
GLMAV弹体的头部为反射棱镜和光学CCD摄像机,摄像头上的CCD传感器通过反射棱镜将接收到的侦察图像分割,从而可实现垂直或侧面对地观察。该CCD相机为日本索尼生产的130万像素ICX445 CCD相机,分辨率为1296×964。这种观测系统与普通无人机上的光电转塔相比,系统结构非常简单,同时没有运动或转动部件,因此结构坚固,可以承受至少2500g的大发射过载,同时尺寸小、重量轻,可以轻松置于空间狭小的巡飞弹头部。
CCD摄像机之后,是巡飞弹的导航系统。GLMAV巡飞弹虽然个头娇小,但却采用了非常复杂的复合导航系统,其中包括惯性导航系统,它采用MEMS微机电技术制造,尺寸小、重量轻,同时在惯导系统上,还集成了运动、旋转和磁场传感器,能够不断计算GLMAV的位置、方向和速度。这一综合惯导系统属于主动导航系统,不受外界电磁干扰、复杂天候等影响,能保证GLMAV巡飞弹具备稳定的导航飞行性能。除了综合惯导系统,GLMAV巡飞弹上还集成了GPS和气压计(压力传感器),它们与综合惯导系统实现数据融合计算,来不断修正飞行弹道,保证巡飞弹具有精确的飞行轨迹。GLMAV巡飞弹完成侦察任务后还要着陆,这个时候它要使用另外一种制导传感器——超声波主动测距器,它模仿蝙蝠的仿生学测距原理,会向地面发出超声波信号,比气压计和GPS的测量值更加精确,测距最远可达6米。
传感器之后,是整个GLMAV巡飞弹的“大脑”——主板电路,它采用嵌入式计算机结构,使用基于Linux内核开发的实时操作系统,主要用于操控传感器、无线通讯、弹体控制执行机构、自动驾驶和监控系统等。该主板电路直径仅为70毫米,可谓小巧玲珑。
弹体的后半段,则主要是共轴双旋翼及弹体尾翼的折叠、展开和控制系统,GLMAV巡飞弹的共轴双旋翼由弹体内置的无刷电机和伺服电机提供能源和控制力,下旋翼、上旋翼和尾翼分别折叠,收入弹体内,发射时由伺服电机控制打开,并由电机提供动力,旋转工作。
GLMAV巡飞弹还有独立的通讯系统,它在弹体内内嵌全向天线,可以向地面站传输巡飞弹CCD摄像机拍摄的视频信号,最小传输距离500米,帧速达到平均10帧/秒。足够地面站上的炮兵指挥员通过视频对视距外战场情况进行判读,从而制定有针对性的作战方案。
GLMAV作战使用流程
GLMAV平时封装在一个80毫米口径的发射管内,其作战使用流程包括四个阶段:
第一,发射阶段。发射时,发射筒相对地面倾角约为50度,击发GLMAV弹丸后,弹丸先进行约50毫秒左右的内弹道飞行,在GLMAV弹丸即将离开发射管出口时,尾翼展开,用于控制GLMAV弹丸的外弹道飞行姿态。
第二,外弹道阶段。GLMAV 从发射管发射后,与炮射弹丸相似,沿弹道轨迹飞行。在弹道阶段,展开尾翼对飞行起到稳定作用,由于尾翼直径远小于旋翼直径,所以,不会干扰旋翼展开后GLMAV 悬停的空气动力。在设计上,要对尾翼进行优化设计以确保弹道飞行时弹丸的飞行稳定性,同时还要进行减阻设计,尽量减少在巡飞阶段对GLMAV 机动性的影响。外弹道阶段的目的,是通过发射器将GLMAV巡飞弹送到目标区域上方,这一阶段的飞行能量全由发射器提供。这一阶段飞行时间非常短,仅约为10秒。而且在外弹道阶段,GLMAV几乎进行的是不可见的无声飞行,速度快且隐蔽性强。与固定翼巡飞弹飞行速度慢(约100~200千米/小时)、目标大,容易在此阶段被防空武器系统发现和击落不同,GLMAV生存能力很强,具有很高的实战价值。此外,GLMAV在外弹道飞行状态下,完全就是一枚炮弹,因此抗撞击性能好,在复杂的丛林、森林中使用,GLMAV也不会像普通巡飞弹那样容易被树枝等障碍物击落。
第三,飞行状态转换阶段。这一阶段GLMAV巡飞弹通过发射器助推飞到最高点,弹体内部伺服电机触发弹尾的旋翼展开系统,展开共轴反向双旋翼。旋翼展开后在电机的驱动下开始旋转,并逐渐降低GLMAV巡飞弹的飞行高度,在此阶段,GLMAV既保留了前一阶段外弹道飞行的部分存留动能和加速度,还有了类似旋翼飞行器的飞行特点。此时,GLMAV巡飞弹的飞行速度逐渐降低。
第四,巡飞阶段。在这一阶段,为了使旋翼产生一定的推力,保证巡飞弹悬停或飞行工作,要求旋翼必须达到很高的转速,在设计上,上旋翼的尺寸大于下旋翼。上旋翼与稳定杆相连,下旋翼靠斜盘控制,由两个伺服电机控制倾斜。在扭矩相同的情况下,上旋翼的转速要低于下旋翼。GLMAV 巡飞阶段的升力由共轴反向旋转双旋翼的转速控制,飞行方向由周期变距控制器操纵。巡飞阶段是GLMAV巡飞弹侦察、监视作业的主要阶段,在这一阶段,传感器协同工作,对敌方阵地等目标区域进行全面侦察,并将侦察视频信号回传地面站和指挥中心。完成任务后,巡飞弹按照导航系统预先规划的航路返回,并自主降落,着陆前由内嵌主板电路控制打开尾部的降落伞对巡飞弹进行缓冲软着陆,由炮兵回收,以供下一次使用。
仍处于概念研发和试验阶段
目前,GLMAV巡飞弹主要处于概念研发和试验阶段,并不能称作是一个巡飞弹型号产品。这一新概念巡飞弹目前还面临着许多技术难题亟待攻克。比如转换阶段前后,GLMAV巡飞弹处于两种完全不同的飞行状态,转换前GLMAV是高过载、高加速度、高飞行速度、按照抛物线弹道飞行的炮弹,转换后则变成类似旋翼直升机的飞行器,转换期间巡飞弹的状态稳定,共轴双旋翼的展开,气动问题的解决和研究,飞行器控制等都是难题,需要经过不断地风洞试验、实际飞行试验测试来摸索解决。此外,GLMAV巡飞弹尺寸远比一般直升机小得多,它如何在风力干扰下保持悬停姿态,保证监视视频的图像质量,这也是一个不小的难题。此外,GLMAV与目前的一些炮射侦察弹相比,在结构设计、弹控系统等方面都有很大不同,需要进一步研究以解决这些问题。根据法德联合研究所表示,GLMAV巡飞弹已经取得了很多阶段性研究成果,预计功能完善、性能优异的原型机将会在几年内问世。
 打印本文
打印本文 关闭窗口
关闭窗口